|
Die "Lösung" eines solchen Systems wird nach der
Methode der sogenannten Kleinsten Quadrate bestimmt. Diese soll
nun an einem Beispiel erläutert werden.
Jede Gleichung eines linearen Gleichungssystems kann man sich als
Hyperebene vorstellen. Bei zweidimensionalen Problemen ist dies
eine Gerade, bei dreidimensionalen Problemen eine Ebene und so weiter.
Jeder Punkt, der auf der Hyperebene liegt, stellt damit eine Lösung
der Gleichung dar. Der Schnittpunkt zweier Geraden, die Teil eines
Gleichungssystems mit zwei Unbekannten sind, löst also beide
Gleichungen. Demnach besitzt ein Gleichungssystem dann eine Lösung,
wenn sich alle Hyperebenen in einem Punkt schneiden. Bei überbestimmten
Gleichungssystemen ist das nicht mehr zu garantieren. Betrachtet
man zum Beispiel
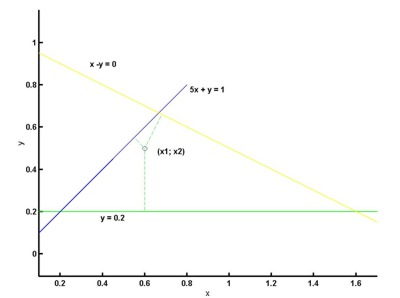
Abbildung 9: Graphische Darstellung des
Beispiels
so erkennt man, daß keine Lösung existiert. Man kann
aber für jeden Punkt (x1;
x2)
messen, wie "gut" dieser die Gleichungen erfüllt.
Dabei ist 0.2-x2
der Fehler in der ersten Gleichung, 0 - x1
- x2 in der zweiten und 1-0.5
x1-x2
der Fehler in der dritten Gleichung. Um zu beurteilen, wie gut (x1;
x2)
alle drei Gleichungen erfüllt, verwenden wir als Maß
r = (0.2-x2)²+(0-x1-x2)²+(1-0.5
x1-x2)².
Offensichtlich gäbe es nur dann einen Punkt (x1;
x2)
mit r=0, wenn das Gleichungssystem eine
Lösung besitzen würde. Da dies in unserem Beispiel nicht
zutrifft, wollen wir (x1;
x2)
jetzt so wählen, daß r minimal
ist. Es ergibt sich
x1
= 0.6 , x2=0.5
mit r = (-0.3)²+(-0.1)²+(0.2)²
= 0.14. Für jeden anderen Punkt (x;y)
ist r > 0.14.
Diese "optimale Lösung" bestimmt man durch das Lösen
der Gaußschen Normalgleichungen. Schreibt man unser überbestimmtes
Anfangssystem in der allgemeinen Form
Ax= b,
dann gibt es im allgemeinen kein x mit
b-Ax = 0. Also bestimmen wir x
so, daß der Residualvektor r = b-Ax
eine möglichst kleine Länge besitzt. Gesucht ist ein Vektor
x* für den Ax*
nahe an der rechten Seite von b liegt.
Abbildung 10: Schema für die beste
Näherungslösung
Die Abbildung 10 zeigt, daß die Lösung durch folgende
Beziehung charakterisiert ist
(b - Ax*) ⊥ Ax (für alle x).
Dabei bedeutet v ⊥ w,
daß die Vektoren v und w
senkrecht aufeinander stehen. Diese Bedingung ist erfüllt,
wenn das Skalarprodukt gleich Null ist, also für
A x • (b - A x*) = 0
Das Skalarprodukt zweier Vektoren x und
y ist als Summe über die Produkte
der Einzelkomponenten xi
·yi
definiert: x • y
= ∑ (i=1...n) xi
·yi. Damit kann es auch
durch das Produkt der transponierten Matrix xT
und y ausgedrückt werden:
xT y = x ·y.
Auf unsere ursprüngliche Forderung angewandt, ergibt sich
(A x)T (b - A x*) = 0
Nach dem Umstellen und Ausmultiplizieren erhält man xT
AT (b - A x*)
= 0 oder
xT (AT
b - AT A x*)
= 0. Diese Gleichung soll für alle x
gelten, was äquivalent ist zu
AT b - AT Ax* = 0
Man erhält die Gaußsche Normalgleichung
AT
A x* = AT
b
Die Anzahl der Gleichungen dieses Systems entspricht der Anzahl
der Unbekannten, da AT
A eine quadratische Matrix ist. Damit kann man jetzt versuchen
die Lösung zu bestimmen. Dieses x* erhält
man durch x* = (AT
A)-1 AT b.
Außerdem ist zu erkennen, daß die Beziehung auch dann
gilt, wenn das ursprüngliche System Ax =
b lösbar ist. In diesem Fall ergibt sich die exakte
Lösung.
Durch die Gaußsche Normalgleichung haben wir eine Möglichkeit,
das überbestimmte Gleichungssystem zu lösen. Es zeigt
sich jedoch, daß diese Methode nicht immer den effizientesten
Ansatz darstellt.
|